数控步进电机驱动系统的总体设计
数控步进电机驱动系统的总体设计
1-1恒坤步进电动机及驱动系统概述
步进电机是一种将电脉冲信号变换成相应的角位移或直线位移的
机电执行元件,每当输入一个电脉冲时,它便会转过一个固定的角度,
这个角度称为步距角
,
简称为步距。
(本数控步进电动机步距角为15度)
脉冲一个一个地输入,电动机便一步一步地转动,步进电机便因之而命
名。
步进电动机和一般旋转电动机动一样,分为定子和转子两大部分。
定子由硅钢片叠成,装上一定相数的控制绕组,由环行分配器送来的电
脉冲对多相定子绕组轮流进行励磁;转子本身没有励磁绕组的叫做“反
应式步进电机”
,用永久磁铁做转子的叫做“永磁式步进电动机”。步时电动机的结构形式虽然繁多,但工作原理都相同。
1-2
恒坤步进电机驱动系统的总体设计
单片机虽然是一个五脏俱全的计算机,但由于本身无开发能力,必须借
肋开发工具来开发应用软件以及对硬件系统进行诊断。因此,用户要研制
一个较完整的单片机产品时,必须完成以下几步工作:
(1)硬件电路设计、组装、调试;
(2)应用软件的编制、调试;
(3)应用软件的链接调试、固化、脱机运行(即脱离开发装置)。单片机应用系统的开发过程包括总体设计、硬件设计、软件设计等几
个阶段,但各阶段不是绝对分开的,有时是交叉进行的。
1-2-1
恒坤步进电机硬件设计的特点:
(1)
硬件结构应结合应用软件方案一并考虑。
硬件结构与软件方案会产
生相互影响,考虑的原则是:软件能实现的功能尽可能由软件来实现,以
2
简化硬件结构。但必须注意如用软件来实现的硬件功能,其响应时间要比
直接用硬件来实现花的时间长,而且占用
CPU
时间。因此,选择软件方案
时,要考虑到这此因素。
(2)整个系统中相关的器件要尽可能做到性能匹配。
(3)可靠性及抗干扰设计是硬件系统设计不可缺少的一部分,它包括芯
片、器件选择、去耦滤波、印刷电路板布线、通道隔离等。
(4)单片机外接电路较多时,必须考虑其驱动能力。驱动能力不足时,
系统工作不可靠,解决的办法是增加驱动能力,增设线驱动器或者减少芯
片功耗,降低总线负载。
本系统的硬件设计包括:键盘输入电路设计、振荡电路、中断电路、
复位电路、键盘输入电路、数字显示与驱动电路、步进电机及其驱动电路
等。
在完成各个单元电路的设计与调试后,我们与软件系统进行了联调,
且达到了一个较为理想的结果。
1-2-2
恒坤数控步进电动机驱动系统软件设计的特点:
应用系统中的应用软件是根据系统功能要求设计的,应可靠地实现系
统的各种功能。应用系统种类每秒多,应用软件各不相同,但是一个优秀
的应用系统的软件应具有下列特点:
(1)软件结构清晰、简捷、流程合理。
(2)各功能程序实现模块化、子程序化。这样,既便于调试、链接,又
便于移植、修改。
(3)程序存储区、数据存储区规划合理,既能节约内存容量,又使操作
方便。
(4)实现全面软件抗干扰设计。软件抗干扰是计算机应用系统提高可靠
性的有力措施。
本系统软件设计采用汇编语言编程,程序编译通过后,我们进行了固化,
并与系统的硬件进行了联调,达到了一个较令人满意的效果。
3 本数控步进电机驱动系统机总体开发与设计的流程图如图1所示
:
图1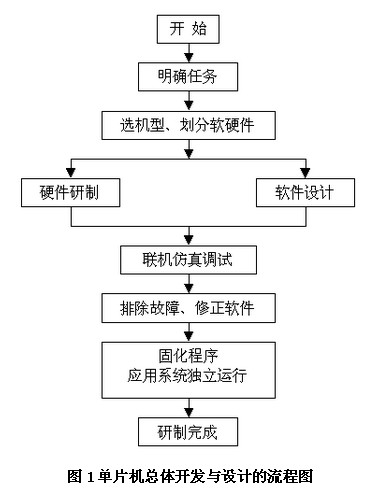
单片机总体开发与设计的流程图
1-3
数控步进电动机驱动系统总体功能介绍
本数控步进电动机驱动系统主要完成以下功能
:
(1)
步进电机按键盘输入电路设定的圈数,按
A
键旋转相应的圈数
同时显示电路倒计时显示已转的圈数;
(2)
点动正反转运行